Kosmonautyka.pl > Projekt M
Projekt M
Projekt M to projekt NASA wysłania na Księżyc robota humanoidalnego.
Robonauta zatykający flagę na Księżycu (grafika: NASA)
Koncepcja
Koncepcja przewiduje lądowanie na Księżycu robota humanoidalnego o nazwie Robonaut 2 (R2) zaledwie 1 000 dni (niecałe 3 lata) od oficjalnego zaakceptowania projektu. Nadzorowany z Ziemi robot miałby wykonywać spacery i prace na powierzchni Księżyca - w tym zatknięcie amerykańskiej flagi. Misja pokazać by miała zdolność NASA do przeprowadzenia ponownego lotu i lądowania na Księżycu. Koncepcja została opracowana w NASA w 2010 roku przez zespół pod kierownictwem Stephena J. Altemusa z jej ośrodka badawczego Johnson Space Center (JSC).

Robonaut na Międzynarodowej Stacji Kosmicznej ISS (grafika: NASA)
Lądownik księżycowy
![]()
Prototypowy lądownik Pixel (grafika: Armadillo Aerospace)
Do lądowania na powierzchni Księżyca wykorzystać by miano lądownik księżycowy zbudowany przez firmę Armadillo Aerospace. Wygrała on z kilkoma innymi firmami Lunar Lander Challenge - konkurs NASA na prototypowy lądownik księżycowy.
![]()
Protoptypowy lądownik Pixel (grafika: Armadillo Aerospace)
Lądowniki tej firmy napędzane są przez nadtlenek wodoru (utleniacz) i metanol (paliwo). Jako konstrukcje aerodynamicznie niestabilne (bez stateczników) i przeznaczone do docelowego działania na Księżycu (brak atmosfery) ich równowaga zachowywana jest poprzez napęd rakietowy przy ustaleniu pozycji lądownika w 3 osiach przez żyroskopy światłowodowe.
Po znalezieniu się na orbicie Księżyca lądownik używałby dalmierza laserowego do określenia odległości od niego.
(grafika: NASA)
W miarę zniżania druga, migająca szybko silna wiązka laserowa omiatałaby i skanowała powierzchnię Księżyca tworząc cyfrową siatkę ukształtowania terenu. Siatka ta byłaby "pobierana" 30 razy na sekundę (jednorazowo kwadrat o wymiarach 100x100 m). Na jej podstawie automatycznie wyszukiwane byłyby potencjalnie niebezpieczne miejsca dla łagodnego lądowania. Aby uniknąć problemu wzbijającego się pyłu od silników rakietowych lądownik zastosowany byłby także radar oraz miernik inercji. Dzięki temu lądownik wiedziałby cały czas o swoim położeniu, wysokości oraz prędkości.
Do startu z powierzchni Księżyca i ponownego wejścia na jego orbitę wymagane jest 3 km/s, co powoduje, że ponad 65% masy całkowitej lądownika zajmowałby paliwo.
Przekrój przez lądownik (grafika: NASA)
Elektronika lądownika chroniona byłaby przez promieniowaniem kosmicznym tylko na poziomie technik projektowania układu, nie zaś technik drogiego wytwarzania mikroprocesorów odpornych na promieniowanie, co jest przyjęte w branży kosmonautycznej. To nie wymagałby zmian produkcyjnych u producentów elektroniki, ich procesów wytwórczych oraz używania specjalnych materiałów. Elektronikę wykonać by mogłyby prywatne firmy wykorzystując popularne komponenty elektroniczne co przełożyłby się na znacznie niższy koszt.
Uszkodzenia w elektronice powodowane przez promieniowanie kosmiczne, powodowane przez nie zmiany wartości logicznych i inne błędy niwelowałaby równoległa technologia przetwarzania danych (ang. multi-core processing). Wiele procesorów zastąpiłyby jeden. Zagwarantowałby to nie tylko niezawodność, ale także dużą wydajność. Dla lądownika wymienia się procesory takie jak Maestro/Tilera48.
System telekomunikacyjny (grafika: NASA)
Architektura telekomunikacyjna jest dopasowana do transmisji pasmo Ka (26-40 GHz) z jakiej korzystają sztuczne satelity Ziemi do usług Internetu satelitarnego i oraz Lunar Reconnaissance Orbiter (LRO), orbiter (sztuczny satelita) Księżyca. Dzięki temu możliwa by była szerokopasmowa transmisja wideo z powierzchni Księżycam, w tym także w 3D.
Robonauta
Robot humanoidalny Robonaut 2 (R2) opracowany został przez Johnson Space Center (JSC) we współpracy z General Motors. Od lutego 2011 roku znajduje się na Międzynarodowej Stacji Kosmicznej (ISS). Robot zbudowany jest "głowy", w której umieszczone zostały kamery, dwóch ramion zakończonych chwytakami oraz tłowia, w którym znajduje się jego komputer sterujący. Posiada ponad 350 sensorów, 42 stopnie swobody, waży 150 kilogramów.
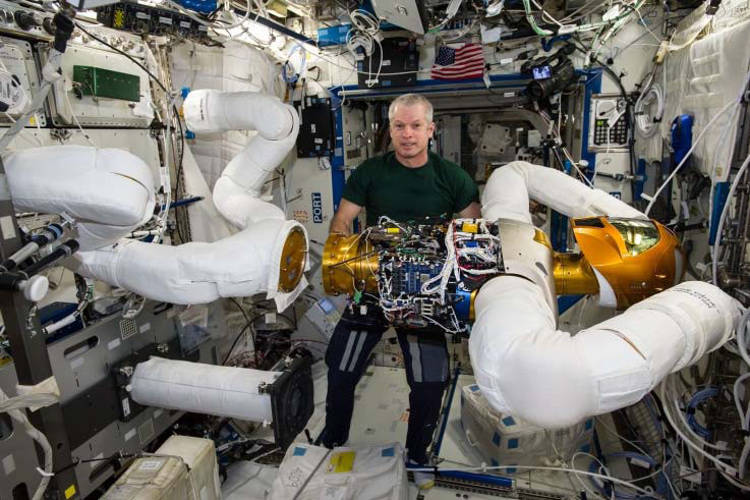
Ulepszanie Robonauty na Międzynarodowej Stacji Kosmicznej ISS (grafika: NASA)
R2 może wykonywać prace narzędziami używanymi przez ludzi podczas spacerów kosmicznych.
Opracować by trzeba było algorytmy pozwalające R2 na poruszanie się środowisku księżycowym, przy 1/6 siły grawitacji, jaką znamy z Ziemi.
Zaletą humanoidalnego robota jest to, że wyposażony jest on w ręce, dłonie i nogi ludzkich rozmiarów. To daje unikalną możliwość przetestowania systemów w kosmosie dla przyszłych misji człowieka. Nie jest to możliwe przy innych typach robotów jak jeżdżące łaziki.
Przebieg misji
Planowany przebieg misji (grafika: NASA)
- Start rakiety nośnej
- Osiągnięcie niskiej orbity okołoziemskiej (LEO)
- TLI (skrót z ang. Trans-Lunar Injection) - wprowadzenie na tor lotu do Księżyca
- TCM 1, 2, 3 i 4 (skrót z ang. Trajectory-Correction Maneuver) - manewry korekcji toru lotu
- LOI (skrót z ang. Lunar Orbit Injection) - wejście na niskią orbity okołoksiężycową (100 km)
- DOI (skrót z ang. Descent Orbit Insertion) - wprowadzenie na orbitę zejścia
- PDI (skrót z ang. Powered Descent Initiation) - rozpoczęcia hamowania
- Lądowanie
- Aktywność na powierzchni Księżyca
Planowane etapy podróży na Księżyc (grafika: NASA)Koszt
Autorzy przewidują, że ich projekt lądownika i Robonauty kosztowałby mniej niż 200 mln USD. Dodatkowe środki wymagane by były na rakietę nośną. Cała misja odbyć się by miała w ramach jednego startu dostępnej na rynku średniej rakiety nośnej typu Falcon 9 (ok. 60 mln USD za start) czy Atlas V (ok. 160 mln USD za start). Daje to zatem całkowitą kwotę misji 260-360 mln USD (1-1,4 mld PLN).
Koncepcja została przedstawiona w 34 stronicowym dokumencie NASA "Landing a Humanoid Robot on the Moon in a 1000 Days - Project M".
Wsparcie

Na bieżąco. Za darmo. Codzienne.
Wesprzyj rozwój portalu Kosmonautyka.pl!Kosmonautyka.pl na serwisach społecznościowych: